
An interactive Baymax robot built in 36 hours at UofTHacks 12 by a 4-member team, featuring 3D-printed structure, custom motor circuitry with EMI protection, and real-time AI interaction via TCP/IP. A fine-tuned voice model trained on Big Hero 6 clips enabled the robot to speak and answer questions in Baymax’s voice, delivering an authentic and engaging character experience.
Collaborated with a 4-member team during the 36-hour UofTHacks 12 hackathon to design and build an interactive Baymax robot.
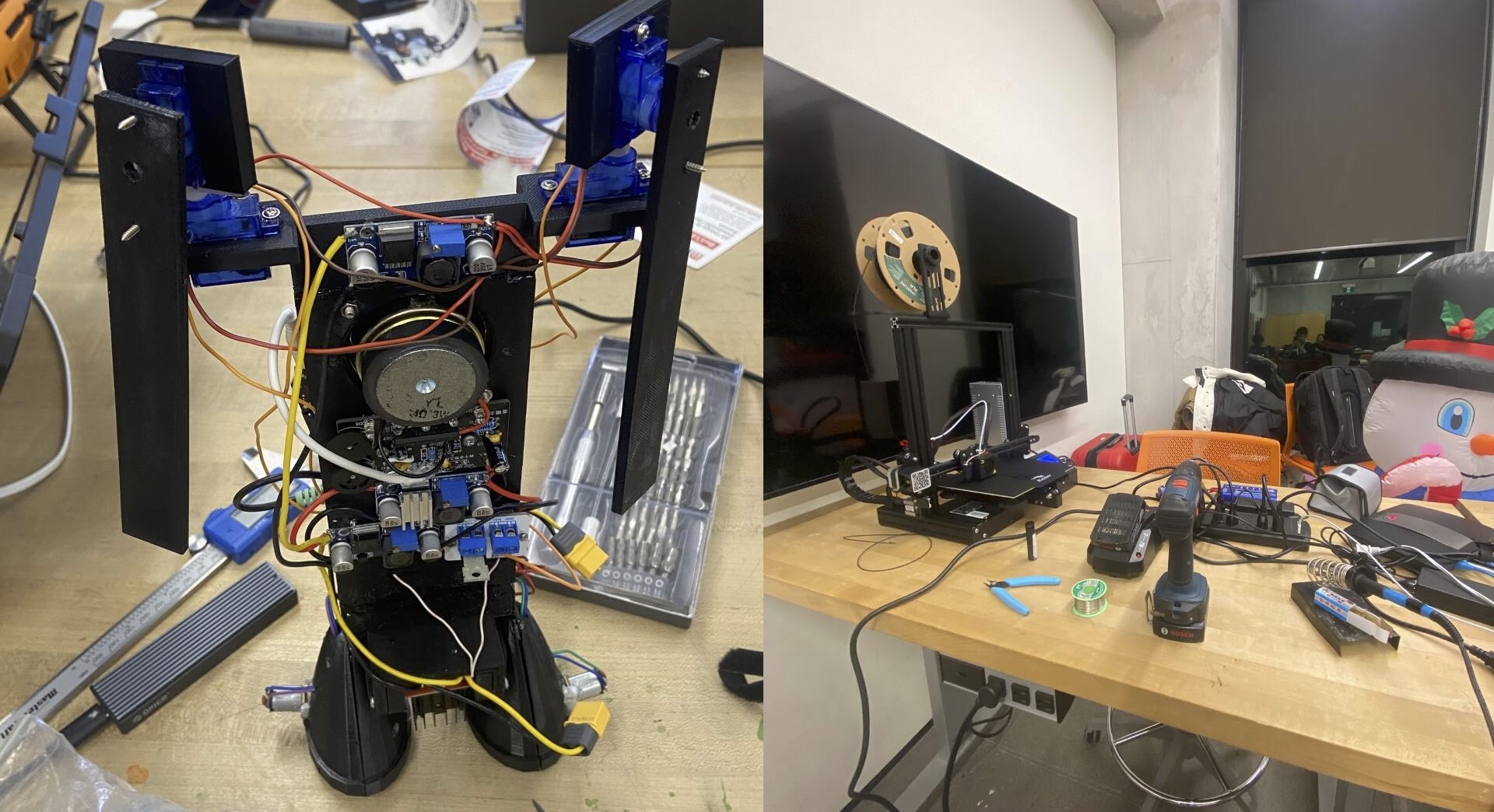
Designed and 3D-modeled the mechanical structure of Baymax and the motorized power wheels using Fusion 360, ensuring stability, accurate weight distribution, and ease of assembly under time constraints.
Prototyped and validated a custom circuit board for motor and speaker control, implementing EMI mitigation techniques such as filtering and optimized PCB layout to ensure consistent performance.
Developed backend firmware and integrated TCP/IP communication protocols in C++ to enable real-time interaction with AI software.
Trained a custom AI voice model using video clips from Big Hero 6, allowing the robot to respond to questions in the tone and personality of Baymax, delivering an engaging and authentic character experience.


